ev3dev-browser VS Code Extension Beta Release 13 Jul 2020
Update 2020-07-20: Extension v1.2.0 has been released in the VS Code marketplace.
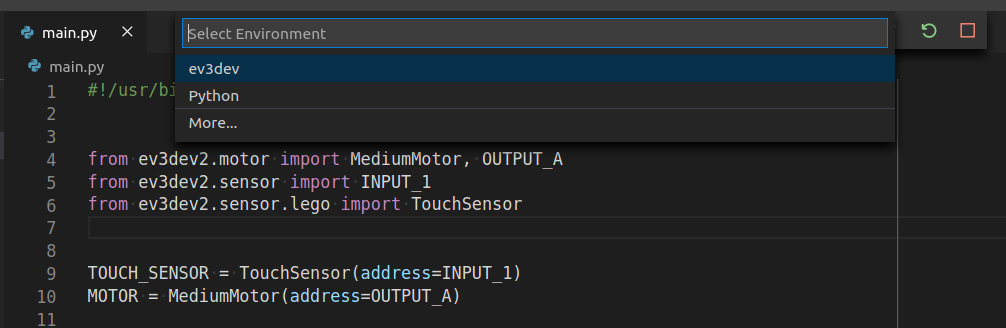
We are working on the next release of the ev3dev-browser VS Code Extension and we need testers! This version mostly contains bug fixes. It should do a better job detecting ev3dev devices. It also fixes a bug where subprocesses on the EV3 are not stopped when clicking the red stop button in VS Code.
Continue reading...
ev3dev-stretch R3 Release 10 Apr 2020
After a month of testing, ev3dev-stretch R3 is ready to go! Thanks to everyone who downloaded and tested the release candidate!
The new SD card image can be found on the main downloads page.
Continue reading...
ev3dev-stretch R3 Release Candidate 11 Mar 2020
We have a new stable release candidate ready for testing.
Update 2020-03-23: new snapshot has been uploaded that supersedes 2020-03-07 SD card image.
Download snapshot-ev3dev-stretch-ev3-generic-2020-03-23.img.xz from here.
Continue reading...
ev3dev-browser VS Code Extension Beta Release 13 Feb 2020
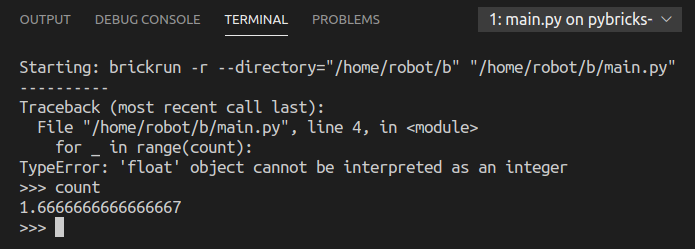
We are working on the next release of the ev3dev-browser VS Code Extension and we need testers! This version has a cool new feature for debugging your Python programs.
Continue reading...
ev3dev-stretch R2 Release 29 Oct 2019
Today, we are releasing ev3dev-stretch R2. This is a minor security and stability
update and is recommended for all users of ev3dev-stretch.
Thank you to everyone who has downloaded ev3dev-stretch snapshots, tested them
and reported issues on GitHub.
Continue reading...
