After several months’ work, python-ev3dev version 2 is available in beta. This release is specifically targeted at ev3dev-stretch, and comes with a variety of improvements to existing interfaces as well as some new features. In particular, we hope that writing software for driving robots will now be significantly easier.
The highlights include:
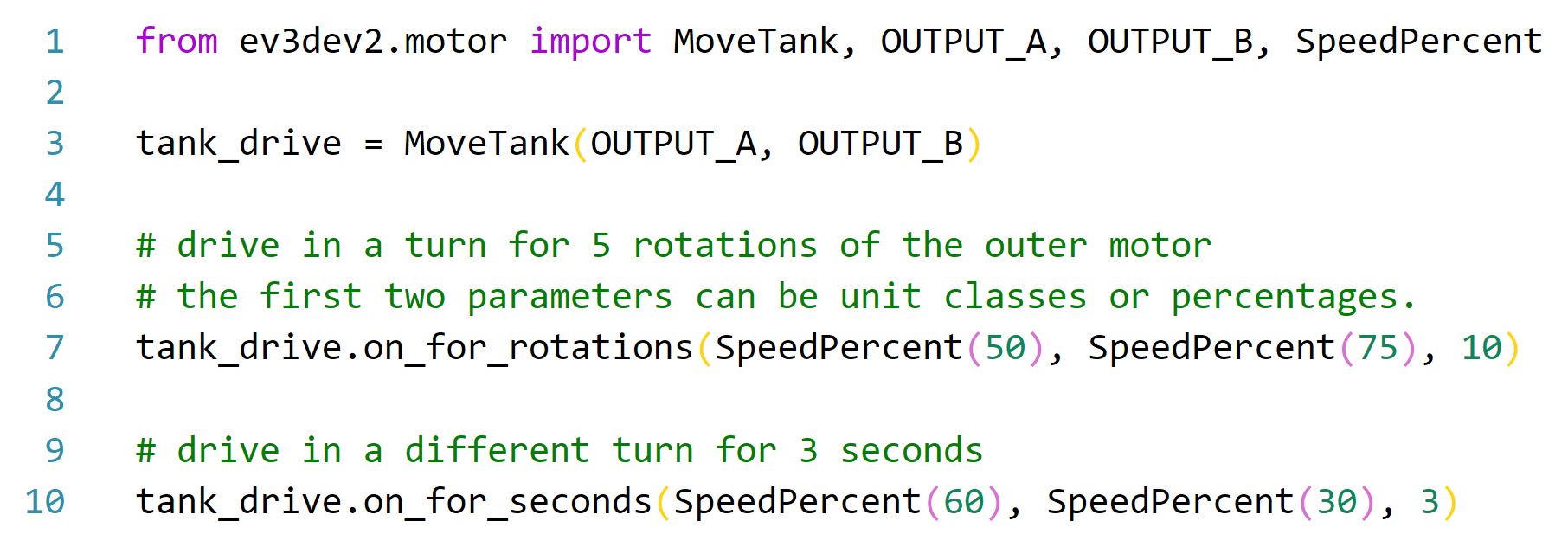
- New classes are available for coordinating motors:
ev3dev2.motor.MotorSet,ev3dev2.motor.MoveTank,ev3dev2.motor.MoveSteering, andev3dev2.motor.MoveJoystick. - Classes representing a variety of motor speed units are available and accepted by many of the motor interfaces: see our docs to learn more.
- Friendlier interfaces for operating motors and sensors: check out
ev3dev2.motor.Motor.on_for_rotationsand the otheron_for_*methods on motors. - Easier interactivity via buttons: each button now has
wait_for_pressed,wait_for_releasedandwait_for_bump - Improved
ev3dev2.sound.Soundandev3dev2.display.Displayinterfaces - New color conversion methods in
ev3dev2.sensor.lego.ColorSensor
If you haven’t already, see @dlech’s news post on Stretch
for information on the new ev3dev version. If you’re running the image from August 6
or newer, the library should come pre-installed; otherwise, you’ll need
to install the python3-ev3dev2 package via apt-get.
Once your ev3dev installation is ready, head over to our upgrading guide to get started!
Post Info
- Posted on 06 August 2018
-
